
Unmanned aerial vehicles (UAVs) are becoming increasingly affordable and widely used. A problem of interest is how a team of UAVs can be used for payload transportation, for example, to help provide aid to those in need during a natural disaster (e.g. deliver medical supplies, food, etc.). Having many smaller, simpler vehicles carry a payload as opposed to one larger, more complex vehicle has certain benefits, including: reconfigurability, redundancy, and safety (e.g. in multirotors, the propellers can be much smaller and spin slower than a single large vehicle, which is especially important if humans will be near the system).
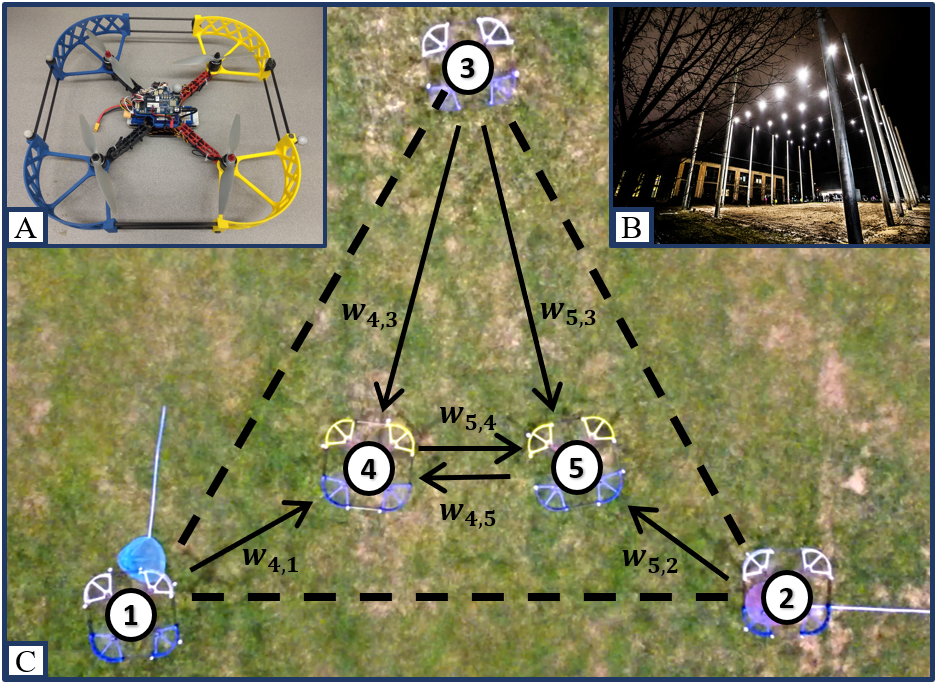
As a first step before payload transport, we considered the formation control of a team of UAVs using a cooperative control technique called Continuum Deformation [2]. This is a leader-follower technique that treats agents as particles of a deformable shape. We implemented this protocol in 2D, experimentally as seen below. We assigned three leaders (UAVs 1,2, and 3) to form a triangle to contain two followers (UAVs 4 and 5). Leaders had their desired trajectories explicitly planned, but followers obtained their desired trajectories based on their neighbors and communication weights. Local deviation bounds of UAVs were used to set limits on the deformation of the shape as a whole in order to guarantee inter-agent collision avoidance and containment within the triangle [1].
This project is being investigated under NSF Grant #1739525 by Dr. Ella Atkins (PI), Dr. Hossein Rastgoftar (Co-PI), and Matthew Romano.
Publications:
-
M. Romano, P. Kuevor, D. Lukacs, O. Marshall, M. Stevens, H. Rastgoftar, J. Cutler, and E. Atkins, “Experimental evaluation of continuum deformation with a five quadrotor team,” in 2019 American Control Conference (ACC). IEEE, 2019, pp. 2023–2029. arxiv. IEEEexplore.
- H. Rastgoftar, H. G. Kwatny, and E. M. Atkins, “Asymptotic Tracking and Robustness of MAS Transitions Under a New Communication Topology,” IEEE Transactions on Automation Science and Engineering, vol. 15, no. 1, pp. 16–32, Jan. 2018. IEEEexplore.
- H. Rastgoftar and E. M. Atkins, “Cooperative aerial payload transport guided by an in situ human supervisor,” IEEE Transactions on Control Systems Technology, no. 99, pp. 1-16, 2018. IEEEexplore.
- H. Rastgoftar and E. M. Atkins, “Continuum Deformation of a Multiple Quadcopter Payload Delivery Team without Inter-Agent Communication,” in 2018 International Conference on Unmanned Aircraft Systems (ICUAS), 2018. IEEEexplore.
- H. Rastgoftar and E. M. Atkins, “Cooperative aerial lift and manipulation (CALM),” Aerospace Science and Technology, vol. 82–83, pp. 105–118, Nov. 2018. ScienceDirect.
- H. Rastgoftar, J.-B. Jeannin, and E. Atkins, “Formal specification of continuum deformation coordination,” in 2019 American Control Conference (ACC). IEEE, 2019, pp. 3358–3363. IEEEexplore.
- H. Rastgoftar and E. M. Atkins, “Safe multi-cluster UAV continuum deformation coordination,” Aerospace Science and Technology, vol. 91, pp. 640–655, Aug. 2019. ScienceDirect.
- Z. Liang, H. Rastgoftar, and E. M. Atkins, “Multi-Quadcopter Team Leader Path Planning Using Particle Swarm Optimization,” in AIAA Aviation 2019 Forum, 2019. ARC.
- H. Rastgoftar and E. M. Atkins, “Multi-UAV Continuum Deformation Flight Optimization in Cluttered urban environments,” in AIAA Scitech 2019 Forum, 2019. ARC.
- H. Rastgoftar, E. M. Atkins, and D. Panagou, “Safe Multiquadcopter System Continuum Deformation Over Moving Frames,” IEEE Transactions on Control of Network Systems, vol. 6, no. 2, pp. 737–749, Jun. 2019. IEEEexplore.
Additional References
- Hossein Rastgoftar, “Continuum Deformation of Multi-Agent Systems,” 2016. Birkhauser-Springer, ISBN: 978-3-319-41593-2. Springer
- H. Rastgoftar and S. Jayasuriya, “Evolution of Multi-Agent Systems as Continua,” Journal of Dynamic Systems, Measurement, and Control, vol. 136, no. 4, p. 41014, Apr. 2014. ASME.