
Project Personnel: Justin Bradley
Project Summary
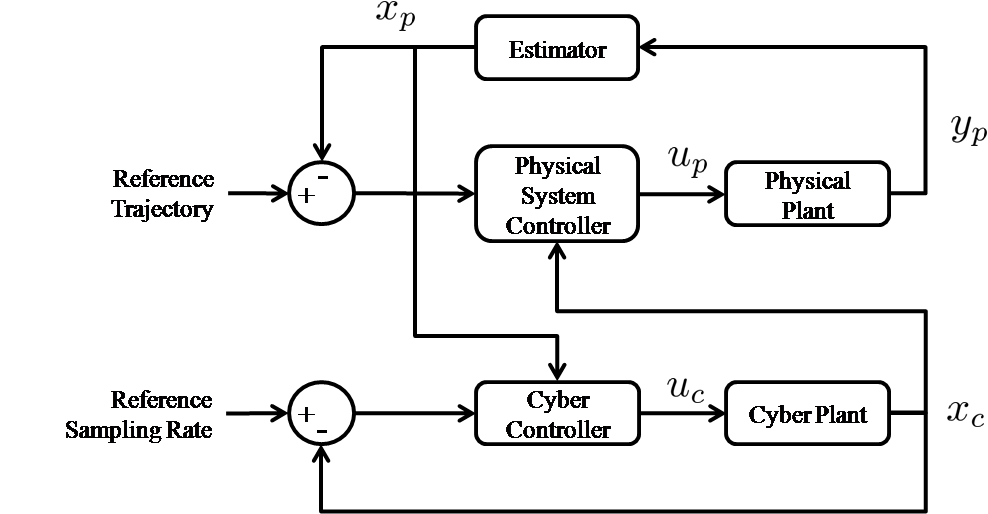
Modern vehicles are equipped with a complex suite of computing (cyber) and electromechanical (physical) systems. Holistic design, modeling, and optimization of such Cyber-Physical Systems (CPS) requires new techniques capable of integrated analysis across the full CPS. This dissertations introduces two methods for balancing cyber and physical resources in a step toward holistic co-design of CPS. First, an ordinary differential equation model abstraction of controller sampling rate is developed and added to the equations of motion of a physical system to form a holistic discrete-time-varying linear system representing the CPS controller.
 |
 |
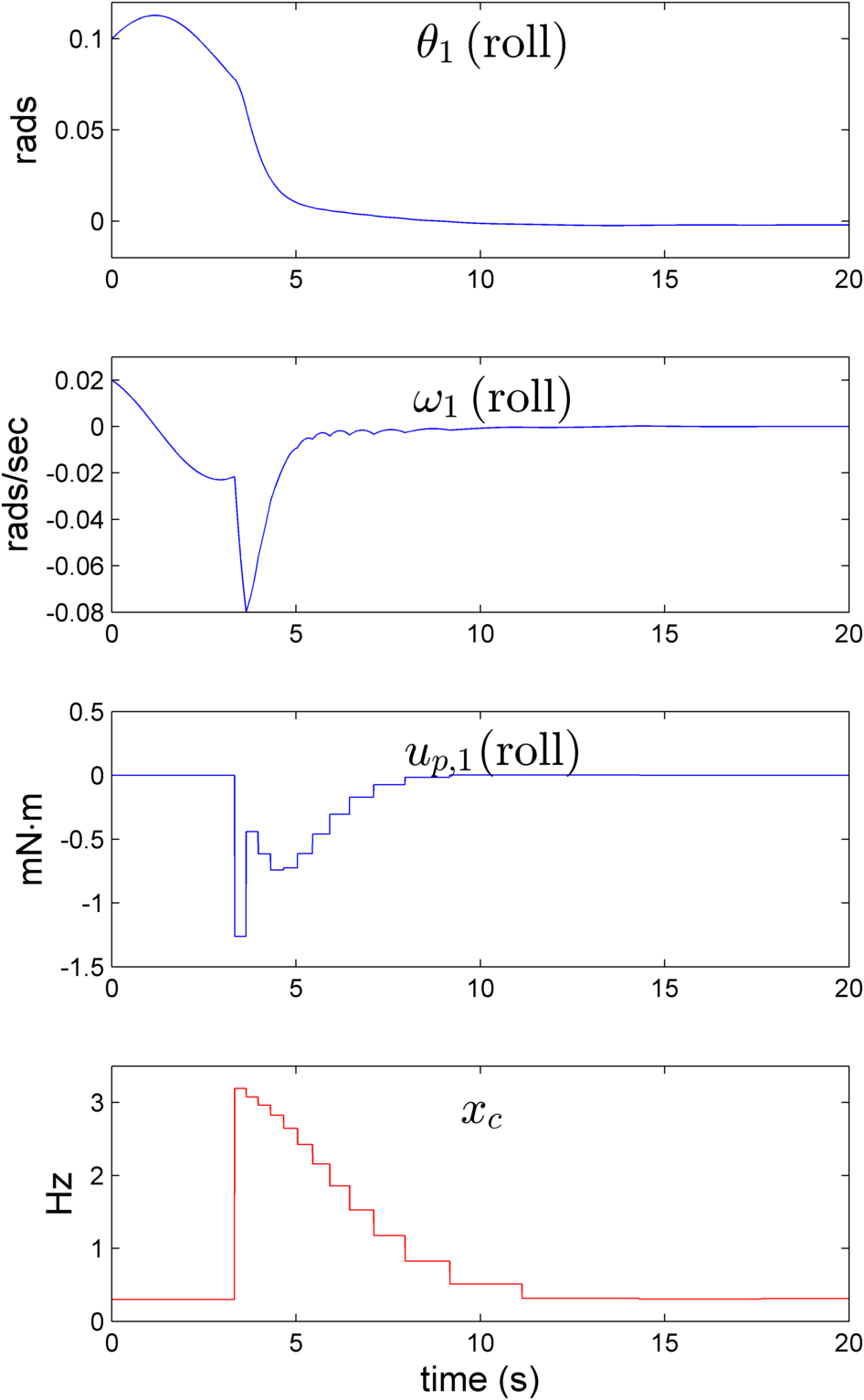
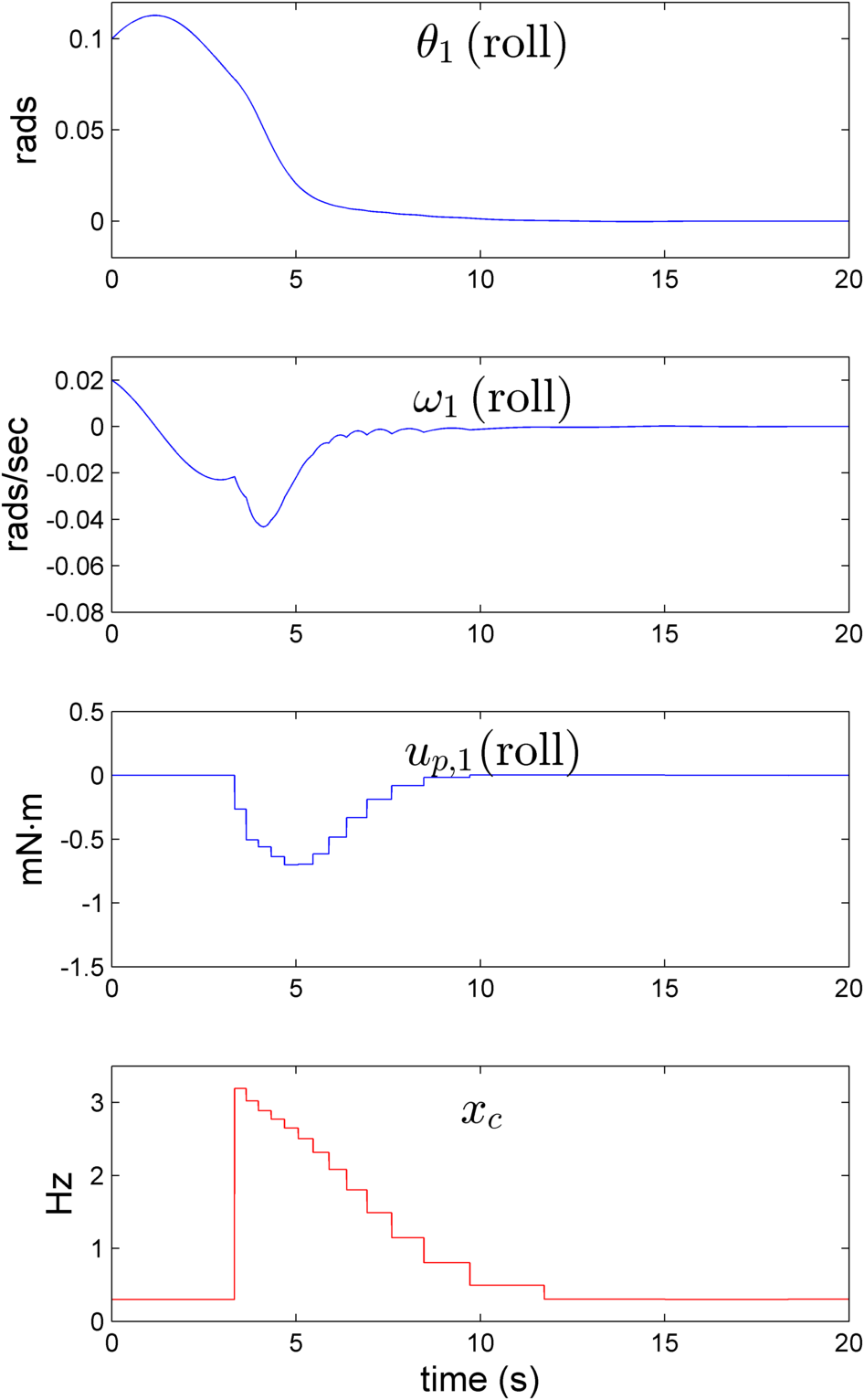
Using feedback control, this cyber effector, sampling rate, is then co-regulated alongside physical effectors in response to physical system tracking error. This technique is applied to a spring-mass-damper, inverted pendulum, and finally to attitude control of a small satellite (CubeSat). Additionally, two new controllers for discrete-time-varying systems are introduced; a gain-scheduled discrete-time linear regulator (DLQR) in which DLQR gains are scheduled over time-varying sampling rates, and a forward-propagation Riccati-based (FPRB) controller. The FPRB CPS controller shows promise in balancing cyber and physical resources.
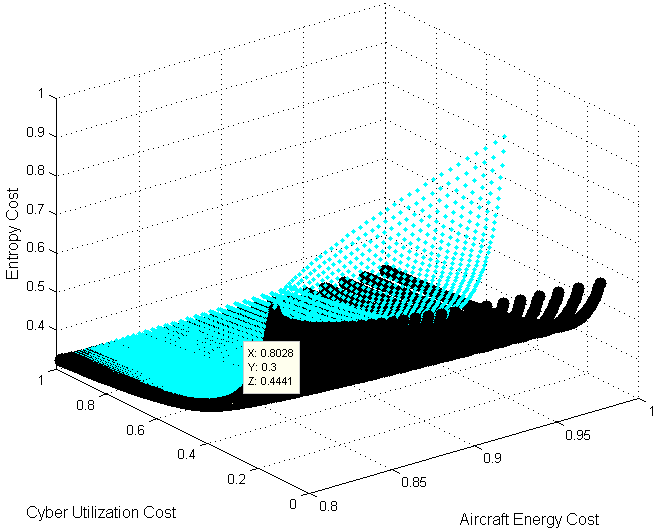
Second, we propose a cost function of cyber and physical parameters to optimize an Unmanned Aircraft System (UAS) trajectory for a pipeline surveillance mission. Optimization parameters are UAV velocity and mission-critical
surveillance task execution rate. Metrics for pipeline image information, energy, cyber utilization, and time comprise the cost function and Pareto fronts are analyzed to gain insight into cyber and physical tradeoffs for mission
success.
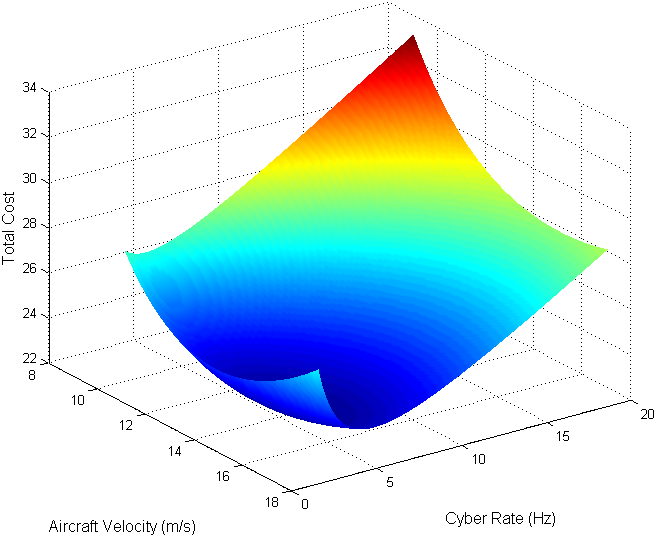
Finally, the cost function is optimized using numerical methods, and results from several cost weightings and Pareto front analyses are tabulated. We show that increased mission success can be achieved by considering both cyber and physical parameters together.
Journal Publications
- J. M. Bradley and E. M. Atkins, “Coupled Cyber-Physical System Modeling and Coregulation of a CubeSat,” IEEE Transactions on Robotics (under review)
- J. M. Bradley and E. M. Atkins, “A Cyber-Physical Optimization Approach to Mission Success for Unmanned Aircraft Systems,” Journal of Aerospace Information Systems, vol. 11, pp. 48–60, January 2014
- J. M. Bradley and E. M. Atkins, “Toward Continuous State-Space Regulation of Coupled Cyber-Physical Systems,” Proceedings of the IEEE, vol. 100, pp. 60–74, January 2012
Conference Publications
- J. M. Bradley, M. L. Clark, E. M. Atkins, and K. G. Shin, “ Mission-Aware CyberPhysical Optimization on a Tabletop Satellite,” in AIAA Infotech@Aerospace, (Boston, MA), August 2013
- E. M. Atkins and J. M. Bradley, “ Aerospace Cyber-Physical Systems Education,” in AIAA Infotech@Aerospace, (Boston, MA), August 2013
- J. M. Bradley and E. M. Atkins, “Multi-Disciplinary Cyber-Physical Optimization for Unmanned Aircraft Systems,” in AIAA Infotech@Aerospace, (Garden Grove, CA), June 2012
- J. M. Bradley and E. M. Atkins, “ Computational-Physical State Co-Regulation in Cyber-Physical Systems,” in ACM/IEEE Conference on Cyber-Physical Systems, (Chicago, IL), ACM/IEEE, April 2011