
Project Personnel: Justin Bradley
Project Summary
Unmanned Vehicles (UXVs) can autonomously accomplish short-term missions by optimizing and following planned task and motion sequences. Human operators of today still provide the intelligent vigilance required to re-scope a mission and reconfigure the system based on interpretation of data. Current automation of UXVs is difficult to scale to complex, long-term missions. Further, automation rigidity can result in undesirable behaviors, shutdown, or UXV loss given anomalous or unexpected events.
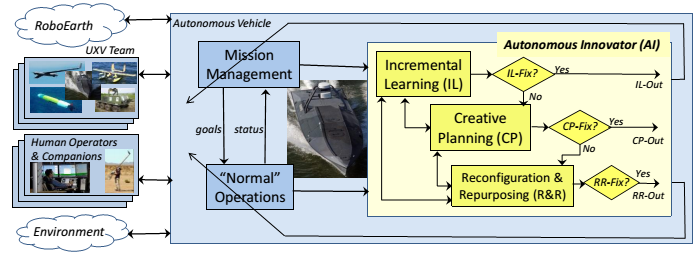
The goal of this project is to augment UXV automation to substantially improve survivability and productivity over long-duration, autonomous missions. To this end, we propose the Autonomous Innovator, a hierarchical decision-maker that endows a traditional UXV with the additional data interpretation and adaptation capabilities required for long-duration mission success. A UXV prioritizes, sequences, and executes goal-oriented actions to accomplish a mission under nominal operational conditions. A UXV may contain limited contingency management, but such behaviors are typically pre-specified, capturing only the anticipated or most probable exceptions designers have envisioned. For longer-term operations, persistent data collection will enable adaptation to deal with reliability issues, a changing environment, and “big data” collected and manipulated over time.
The Autonomous Innovator integrates three complementary thrusts to achieve this goal: (1) Persistent estimation to better correlate models with real-time observations through incremental learning, (2) Identification and handling of unexpected or unplanned-for situations through creative planning, and (3) UXV reconfiguration and repurposing to autonomously or with limited human/system interaction enable an impaired UXV to continue supporting the mission in an altered capacity. UXV adaptation and information processing over “big” datasets must judiciously interact with the global computing network, other UXVs, and the environment. The Autonomous Innovator will enable the UXV to sense, diagnose, and compensate for inaccurate and incomplete physics-based and logic-based models, then modify UXV behavior as needed, e.g., shutting down non-essential systems to conserve energy or serving as a relay station or parts depot when mobility is compromised.